activities
publicity
IDEAS internal web site
| Industrial Demonstrator |
 |
 |
|
To develop agents we use the platform JADE that provides basic middleware-layer functionalities which are independent of the specific application and which simplify the realization of distributed applications that exploit the software agent abstraction. A significant merit of JADE is that it implements this abstraction over a well-known object-oriented language, Java, providing a simple and friendly API. The LEAP (Lightweight Extensible Agent Platform) add-on, when combined with JADE, replaces some parts of the JADE kernel forming a modified runtime environment that we will identify as JADE-LEAP and that can be deployed on a wide range of small devices.
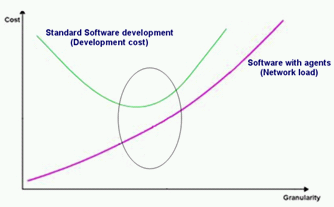
Obviously we can agentify everything but, increasing the granularity, for example realizing a complex system with more agentified modules (major number of elementary skills), the system performance could be bad for a high network bandwidth required and for major difficulties to synchronize all the agents (figure 1).
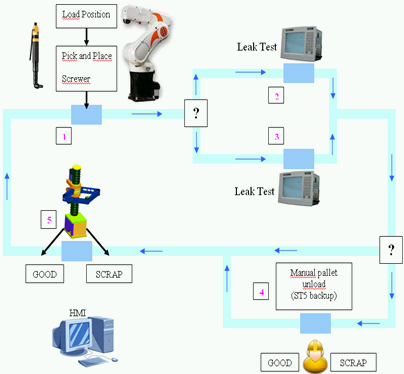
Each agent will have adaptive behaviour, so it can modify its job considering both environment conditions and the information exchanged with others agents. We put our attention on testing and diagnostic procedures. Testing focuses on fault detection. Diagnosis consists of determining the nature of a detected fault, locating and fixing it. We have decided to use “quantitative models based” algorithm based on Kalman filter and neural network. The main advantages of this method are that we can reduce the number of sensors, minimize the disturbance effects, and estimate the same Masmec is developing a demonstrator (figure 2) to show the entire ideas concept from an industrial point of view. The demonstrator has a transportation line that transports pallets with memory tag which contain all the data related to the piece on it. The test case is given by CRF.
The concepts presented on the final demonstrator are:
Station 1: The operator loads the electronic unit with the already mounted but not tightened screws. The KUKA robot picks the unit with one gripper and places it under a screwdriver to tighten all screws. After the robot places the control unit on the pallet.
Station 2 and 3: These stations perform leak tests directly on the pallet through a piston and a “Versa” device. Two stations are used to show the “plug and produce” philosophy.
Station 4: This is a manual station. When station number 5 is out of order the pallet arrives in this manual station and the operator unload it. Red and green lights show the test results.
Station 5: The MASMEC SCARA robot takes the finished piece and puts it in a good or scrap conveyor.
|